

Frequently Bought Together
- This item: INFRARED OBSTACLE AVOIDANCE IR SENSOR MODULE(₹28.00)
- 20CM JUMPER WIRE FEMALE TO FEMALE(₹1.75)
- 20CM JUMPER WIRE MALE TO FEMALE(₹1.75)
- 3MM NUT(₹0.90)
What Is IR Sensor: The Infrared Obstacle Avoidance IR Sensor Module serves as an essential tool for obstacle detection and avoidance in a wide range of applications. Its simplicity, effectiveness, and ease of use make it a popular choice for hobbyists, engineers, and professionals alike. Whether it’s enabling robots to navigate autonomously, guiding vehicles along predefined paths, or enhancing security measures, the Infrared Obstacle Avoidance IR Sensor Module plays a pivotal role in shaping the future of intelligent automation.
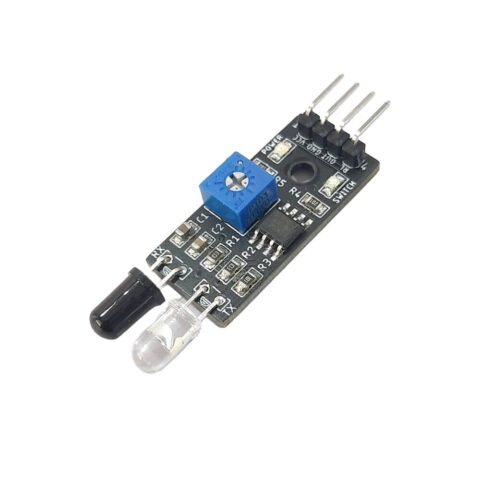
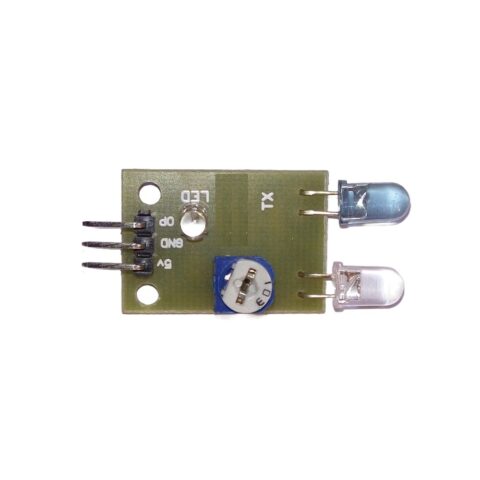
Infrared Sensor working: The Infrared Obstacle Avoidance IR Sensor Module operates based on the concept of infrared light reflection. The module comprises two key components: an IR transmitter and an IR receiver. The transmitter emits IR radiation, which, upon encountering an object in its path, bounces back towards the receiver. The receiver detects the reflected IR radiation and generates a corresponding signal, indicating the presence of an obstacle.
Key Features of ir obstacle sensor:
-
- Sensitivity Adjustment Trimpot: An onboard trimpot allows for fine-tuning the sensor’s sensitivity, enabling adjustments based on specific application requirements.
- Invisible Light Detection: Utilizing infrared (IR) radiation, invisible to the human eye, the sensor detects objects in its path, empowering robots and devices to maneuver with precision.
- Adjustable Detection Range: Tailoring the sensor’s sensitivity to your needs, the adjustable detection range allows for optimal performance in diverse environments.
- Rapid Response Time: Reacting swiftly to obstacles, the sensor minimizes reaction delays, ensuring the safety and efficiency of your projects.
- Simple Integration: Featuring a user-friendly interface and straightforward connections, the sensor seamlessly integrates into various electronic projects.
- Compact and Versatile: The small form factor and lightweight design facilitate integration into space-constrained projects and mobile robot configurations.
- Visual Indicator LED: An integrated LED indicator provides visual confirmation of obstacle detection, facilitating debugging and troubleshooting.
- Straightforward Connectivity: The module features a standard 3-pin interface (VCC, GND, OUT) for straightforward connection with microcontrollers and other electronic devices.
- Effective Detection Range: The module effectively detects objects within a range of 2cm to 30cm, providing ample distance for obstacle avoidance maneuvers.
Technical Specifications of ir obstacle sensor:
-
- Sensor Type: IR Obstacle
- Detection Range: Adjustable (typically 2cm to 30cm)
- Input Voltage: 3.3V to 5V DC
- Output Voltage: 3.3V to 5V DC
- Output Signal: Digital (0 or 1)
- Current Consumption: Typically 20mA
Application of Infrared Obstacle Avoidance IR Sensor Module:
-
- Robotics: Obstacle detection and avoidance in autonomous robots and vehicles
- Line Tracking: Line following applications for automated guided vehicles (AGVs)
- Industrial Automation: Proximity sensing in industrial machinery and assembly lines
- Smart Home Appliances: Obstacle detection in vacuum cleaners and other home appliances
- Security Systems: Perimeter monitoring and intrusion detection systems
Below Topics are considered in this post:
-
- infrared sensor
- IR sensor working
- Features of IR Sensor module
- Application of IR sensor for students and industries
Package Includes:
-
- 1 X Infrared Obstacle Avoidance IR Sensor Module (Active Low)
Additional information
| Weight | 5 g |
|---|---|
| Dimensions | 32 × 14 × 5 mm |
Warranty
- This item is protected with a supplier warranty of 5 days from the time of delivery against manufacturing defects only.
- Reimbursement or Replacement will be done against manufacturing defects only.
- This warranty is void if the device has been damaged by negligence, mishandling, acts of third parties, accident, fire, Flood, lightning, power surges or outages, or other events or circumstances outside the control.




Reviews
There are no reviews yet.